Gabriella Perry
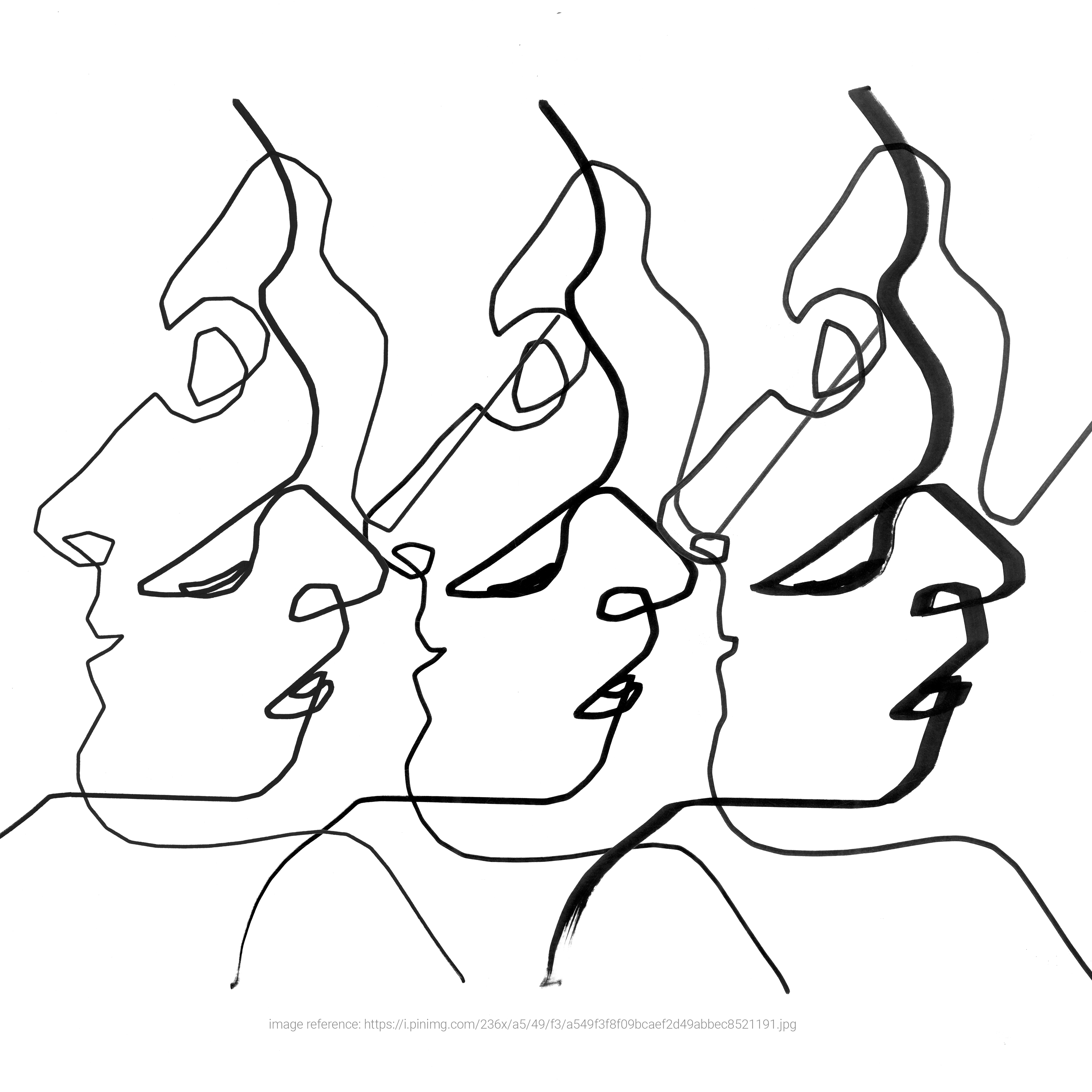
Line-Weight
Robotic Experimentation with an Analog Concept
Virginia Tech, Introduction to Robotics Exercise, Spring 2019
Contributers: Gabriella Perry and Atharva Ranade
Line-Weight is an introductory two-week project to design robotics that experiments with the analog concept of line-weights. Line-weights are a standard drawing convention in architectural drafting that defines the thickness of a line. While the convention seems typical to architects, it does not come as naturally to industrial robot arms. Considerations of pressure and drawing utensil angle must be specified. The benefit to the robot arm is that the line weight is overall more consistent than that of a person, as a person tends to apply an uneven angle and pressure to the drawing utensil.
The drawing tool was designed for a dual-ended Prismacolor pen with two different pen tips. The dual tip allows for a broader range of line weights than a singular tipped utensil. The tool's internal mechanism includes a spring to allow for distributed pressure and ensure the pen tip is not crushed by excessive force. The tool is oriented perpendicular to the z orientation of the robot's base TCP so the pen can be oriented in both tip directions.